双目直接法SLAM:stereo-LSD & stereo-DSO
为了搞清楚双目与单目的主要区别,主要分析双目部分引入的变化。
记录stereo-LSD和stereo-DSO这两篇论文的一些改进方式。
stereo-LSD1
LSD简介
LSD(Large-Scale Direct Monocular SLAM)的优化中没有关键点的深度,只优化关键帧的位姿。利用1个参考关键帧,每个新帧与参考关键帧进行track。track完成后对关键点的深度进行滤波(类似与高斯深度滤波,每个点维护了一个协方差 )2,以此得到深度图。
所有关键帧进行sim(3)上的pose graph优化,LSD会在每个关键帧中提取一部分feature points用来回环检测。
LSD中双目的加入
论文里提到两种多目相结合,达到既可以恢复尺度,又可以适应多种环境变化的效果:
- Static Stereo: 由固定的多目相机形成的双目
- Temporal Stereo: 由不同观测时刻形成的双目
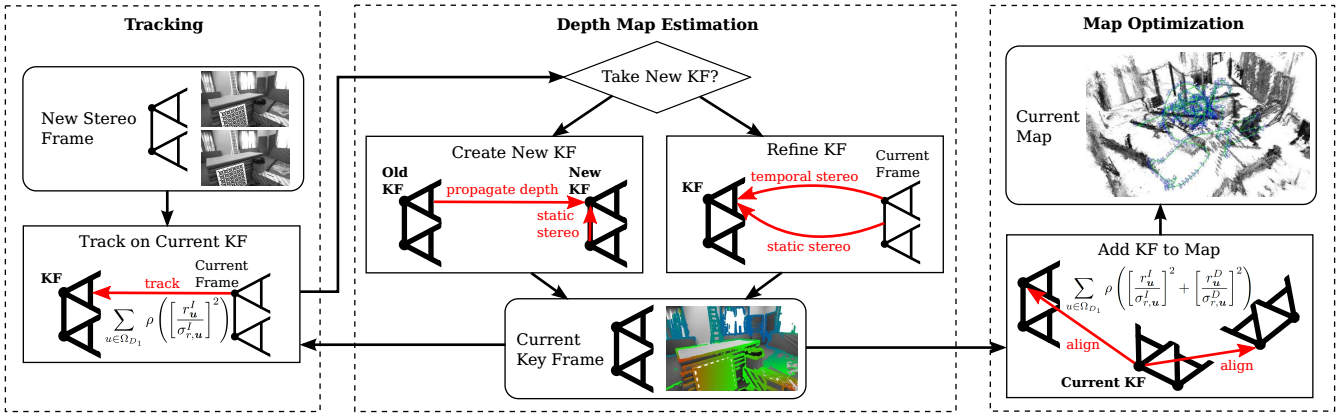
双目相机的加入其实就是在LSD深度滤波时加入了双目,利用双目相机进行深度滤波能得到更好的深度估计值。另外,stereo-LSD中还混合使用了间接法中的几何残差进行联合优化。
另外,stereo-LSD优化时没有将左视图投影到右视图,论文说法是这样做实际上会降低精度,因为更大的基线长度导致直接法投影会有更多外点的误匹配。
While one could choose to add photometric constraints to the new right image , we observed that this can decrease accuracy in practice: typically, the baseline from I1l to I2r is much larger than to I2l, leading to more outliers from occlusions and reflections.
stereo-DSO3
DSO简介
与LSD不同之处在于DSO(Direct Sparse Odometry)采用滑动窗口联合优化点的深度和关键帧的位姿,但是DSO中没有回环检测和位姿图的全局优化。
DSO中双目的加入
与stereo-LSD相同的是,stereo-DSO中也同时使用static stereo和temporal stereo。由于双目相机的加入,初始化时不用采用随机深度,第一帧图像即可得到深度估计,加快了初始化的速度,但是对后续的tack部分没有做修改。
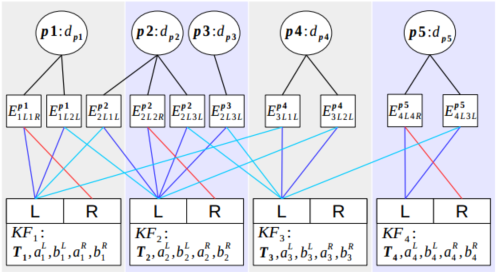
stereo-DSO在滑动窗口的优化方程中,加入了static stereo的误差项,并引入了一个权重$\lambda$,由上图可见,static stereo的残差数量明显比temporal stereo的少,论文中的实验将$\lambda$取为2。
另外,stereo-DSO有一些小改进:
- 双目的极线匹配采用3x5的NCC(normalized cross correlation)。
- 对新关键帧提取关键点时,不再采用正方形的划分区域,而是用与图像比例适应的区域,这样对于kitti这种图像长宽比例比较大的图像比较有利。